2019年1月8日,2018年度国家科学技术奖励大会在北京召开。由上海交通大学和燕山大学联合申报,燕山大学电气工程学院自动化系华长春教授(第二完成人)和龙承念教授(第五完成人)参与完成的《网络系统的分布式感知与协同控制基础理论与方法》成果获国家自然科学二等奖。
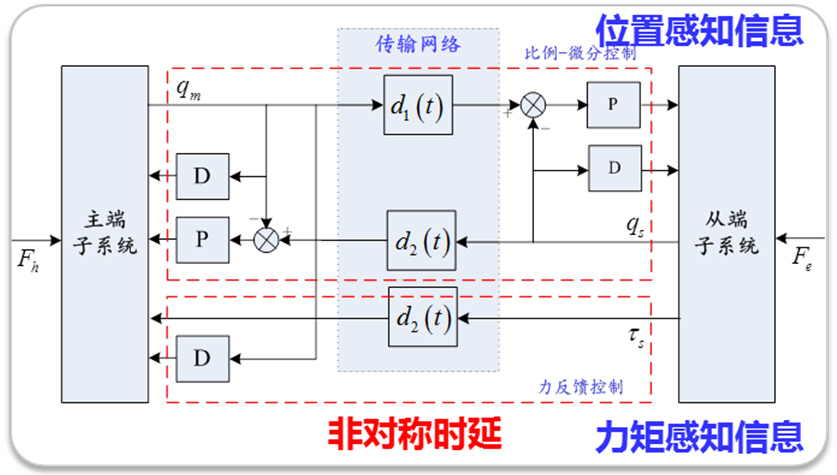
非对称传输时延下的感知反馈新机制

研究成果应用于“三一重机”专业救援挖掘机
网络系统是融合控制和信息通信的多维动态系统,它既包含复杂的物理过程、大量的感知和执行装置,又包含它们之间基于网络的通信连接。这类系统具有维度高、动态性强、通信协议和配置深度嵌入等特性,对其分析和设计异常困难。2002年,由19位国际顶尖专家撰写的《控制、动力学和系统未来方向》报告指出:“信息与控制交互耦合”、“基于局部信息的决策”是网络环境下控制系统的基本特征。如何实现信息感知分布性、控制适应性、整体协调性,已成为网络系统研究的新挑战。
燕山大学华长春教授和龙承念教授自2001年聚焦无线网络系统协同感知问题及典型网络系统网络化远程操控主从系统的感知及控制问题进行了系统性的研究。成功引入网络层间反馈,建立纵向跨层网络容量模型,为多域资源联合优化提供设计框架;设计局部反馈机制与多时间尺度跨层交互博弈策略,揭示算法稳定性与最优性一般规律。成功建立了网络主从子系统前向、反向的非对称时变传输时延模型,提出了并行分布式镇定控制方法;针对非对称时延导致的主从端状态跟踪偏差问题,提出了基于位置感知和直接力矩感知的主从协同稳定性判定准则,突破了传统波变换方法处理时延的局限性,提升了主从透明性。研究成果成功应用于三一重工远程无人挖掘机系统,开发了挖掘机随动控制算法,实现了挖掘机非线性系统远距离高精操控,设备已经进行批量化生产,7台设备已经部署到我国武警应急救援部队,用于危险环境下人不能进入现场的救援。研究成果被军事频道和湖南卫视的“我是未来”节目专题报道。目前发表相关SCI期刊论文150多篇,其中Automatica和IEEE期刊论文60多篇,SCI他人引用2700多次,申请发明专利20多项,出版中英文文专著各1部。
invisible




 0335-8072979
0335-8072979  066004
066004 河北省秦皇岛市燕山大学西校区电气工程学院综合办公室
河北省秦皇岛市燕山大学西校区电气工程学院综合办公室